Please use this identifier to cite or link to this item:
https://doi.org/10.21256/zhaw-3763| Publication type: | Conference poster |
| Type of review: | Peer review (publication) |
| Title: | Generating research aims for legged robots : a market and dependability approach |
| Authors: | Doran, Hans Dermot Hannich, Frank |
| DOI: | 10.21256/zhaw-3763 |
| Conference details: | ICRA 2018 Workshop: Multilegged Robots, Brisbane, Australia, 25 May 2018 |
| Issue Date: | Jun-2018 |
| Publisher / Ed. Institution: | ZHAW Zürcher Hochschule für Angewandte Wissenschaften |
| Language: | English |
| Subjects: | Autonomous robotics; Legged robot; Safety and dependability; STPA; Robotics marketing |
| Subject (DDC): | 620: Engineering |
| Abstract: | We content that real-world widespread adoption of multi-legged robots is not due to some magic missing engineering ingredient but due, by and large, to two related factors. The first is that the market must be educated as to the potential benefits of such technology and secondly any missing engineering ingredients need to be market derived and not research specified. After discussing the issue of educating the market we proceed with an example of generating market-oriented technical requirements which specifically result in new controller architectures. We continue this example with two examples of requirements generated by technical analysis, including Systems Theoretic Process Analysis, and so show that whilst the continuation of fundamental research is necessary if multi-legged robots are to find a sustainable set of real-world applications research resources need to be guided into market research and market orientated industrialisation. |
| URI: | https://digitalcollection.zhaw.ch/handle/11475/7092 |
| Fulltext version: | Published version |
| License (according to publishing contract): | Not specified |
| Departement: | School of Engineering |
| Organisational Unit: | Institute of Embedded Systems (InES) |
| Appears in collections: | Publikationen School of Engineering |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 18 WMLR Doran .pdf | 402.42 kB | Adobe PDF |  View/Open | |
| WMLR_18_donn_poster_donn_A0.pdf | 219.05 kB | Adobe PDF | 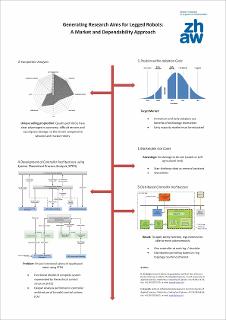 View/Open | |
| Video01_FrankHans.mp4 | 268.67 MB | Unknown | View/Open |
Show full item record
Doran, H. D., & Hannich, F. (2018, June). Generating research aims for legged robots : a market and dependability approach. ICRA 2018 Workshop: Multilegged Robots, Brisbane, Australia, 25 May 2018. https://doi.org/10.21256/zhaw-3763
Doran, H.D. and Hannich, F. (2018) ‘Generating research aims for legged robots : a market and dependability approach’, in ICRA 2018 Workshop: Multilegged Robots, Brisbane, Australia, 25 May 2018. ZHAW Zürcher Hochschule für Angewandte Wissenschaften. Available at: https://doi.org/10.21256/zhaw-3763.
H. D. Doran and F. Hannich, “Generating research aims for legged robots : a market and dependability approach,” in ICRA 2018 Workshop: Multilegged Robots, Brisbane, Australia, 25 May 2018, Jun. 2018. doi: 10.21256/zhaw-3763.
DORAN, Hans Dermot und Frank HANNICH, 2018. Generating research aims for legged robots : a market and dependability approach. In: ICRA 2018 Workshop: Multilegged Robots, Brisbane, Australia, 25 May 2018. Conference poster. ZHAW Zürcher Hochschule für Angewandte Wissenschaften. Juni 2018
Doran, Hans Dermot, and Frank Hannich. 2018. “Generating Research Aims for Legged Robots : A Market and Dependability Approach.” Conference poster. In ICRA 2018 Workshop: Multilegged Robots, Brisbane, Australia, 25 May 2018. ZHAW Zürcher Hochschule für Angewandte Wissenschaften. https://doi.org/10.21256/zhaw-3763.
Doran, Hans Dermot, and Frank Hannich. “Generating Research Aims for Legged Robots : A Market and Dependability Approach.” ICRA 2018 Workshop: Multilegged Robots, Brisbane, Australia, 25 May 2018, ZHAW Zürcher Hochschule für Angewandte Wissenschaften, 2018, https://doi.org/10.21256/zhaw-3763.
Items in DSpace are protected by copyright, with all rights reserved, unless otherwise indicated.